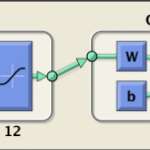
ann_neurons

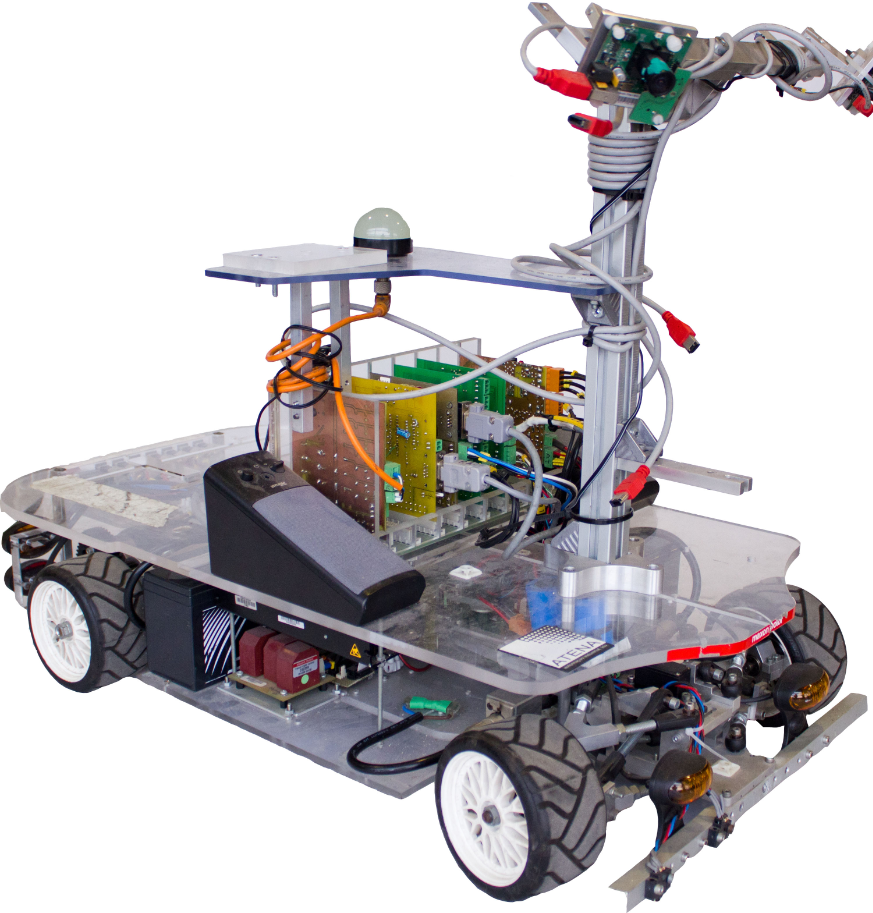
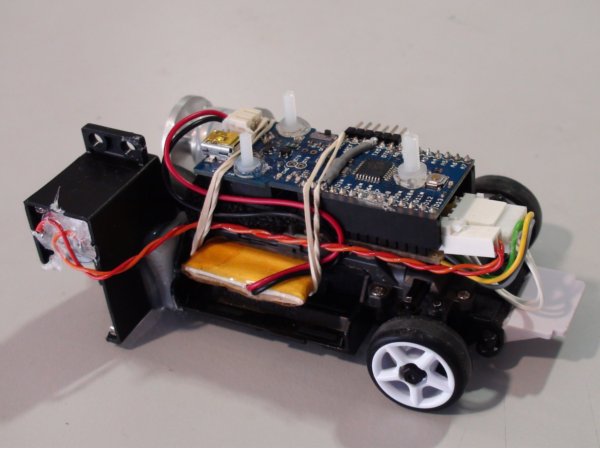
atlasmv

boids1

boids2
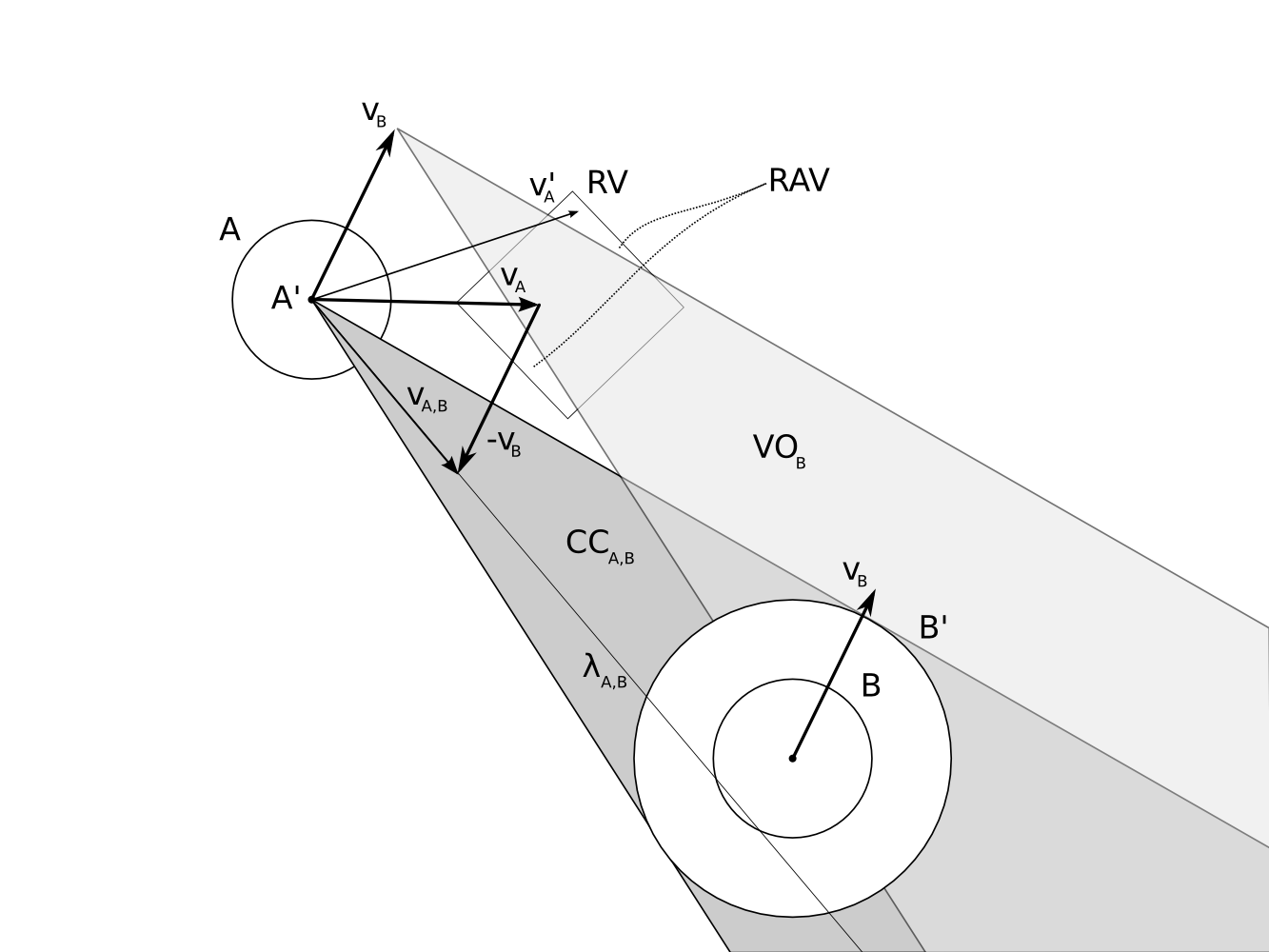
cca
cca_ex1
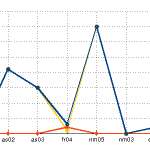
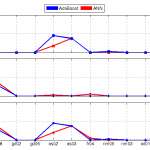
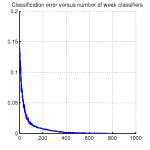
class_complete_full

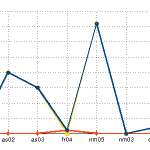
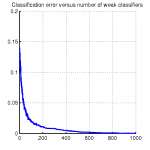
class_complete_reduced1

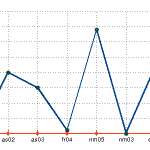
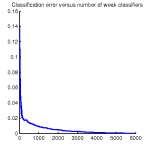
class_complete_reduced2
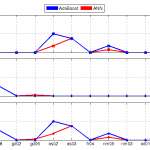
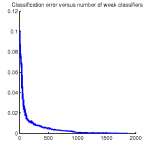
class_stripped_full
class_stripped_reduced1
class_stripped_reduced2
classification_legend

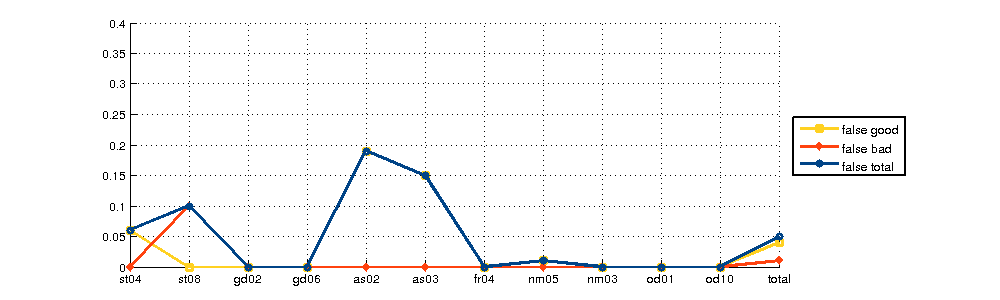
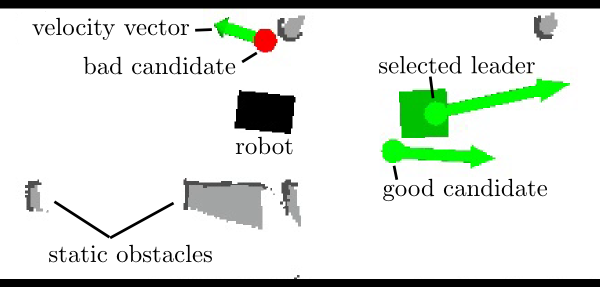
classification_test_legend

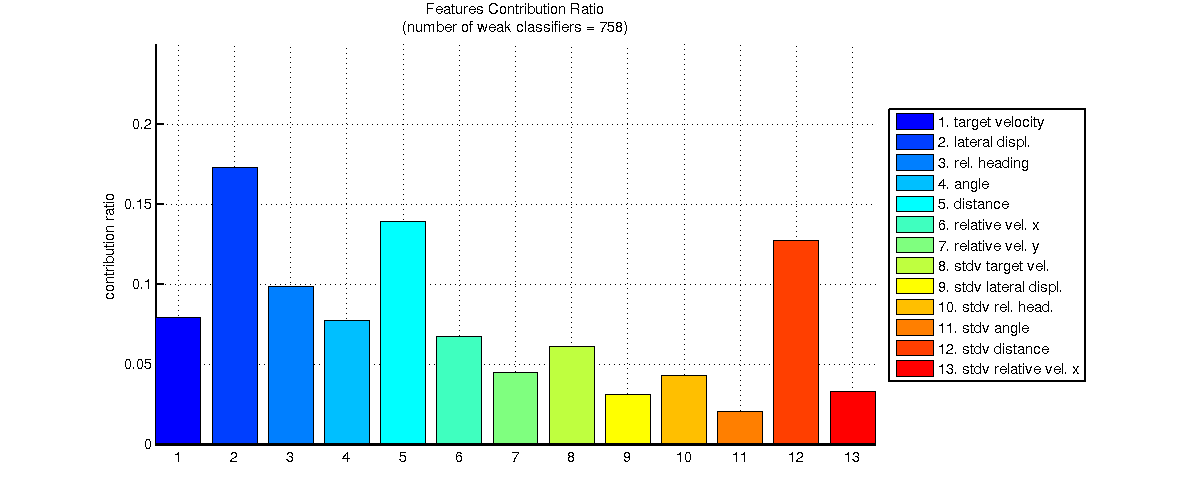
complete_full
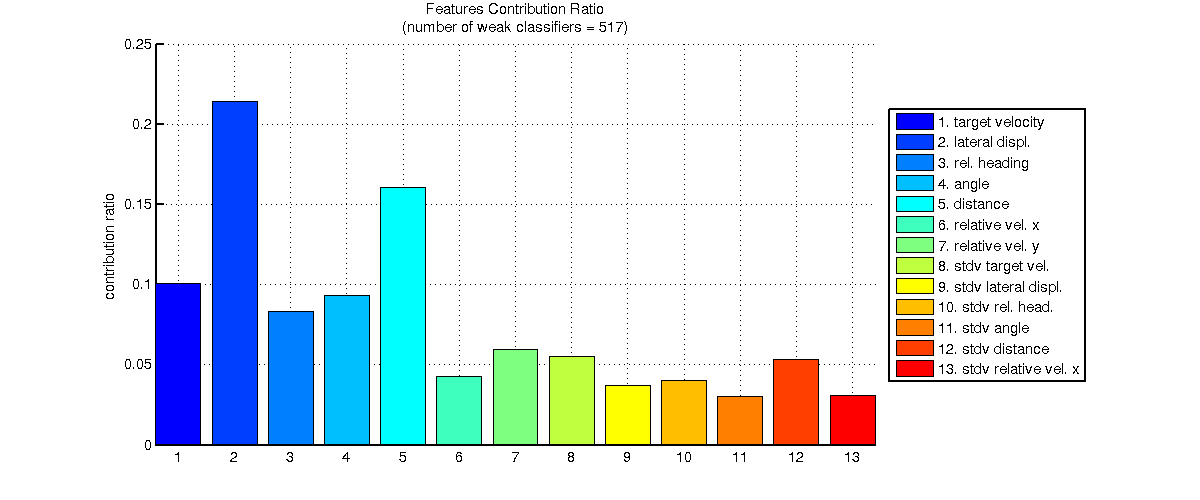
complete_reduced1
complete_reduced2

configuration_space_robot
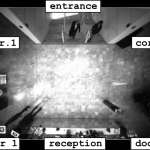
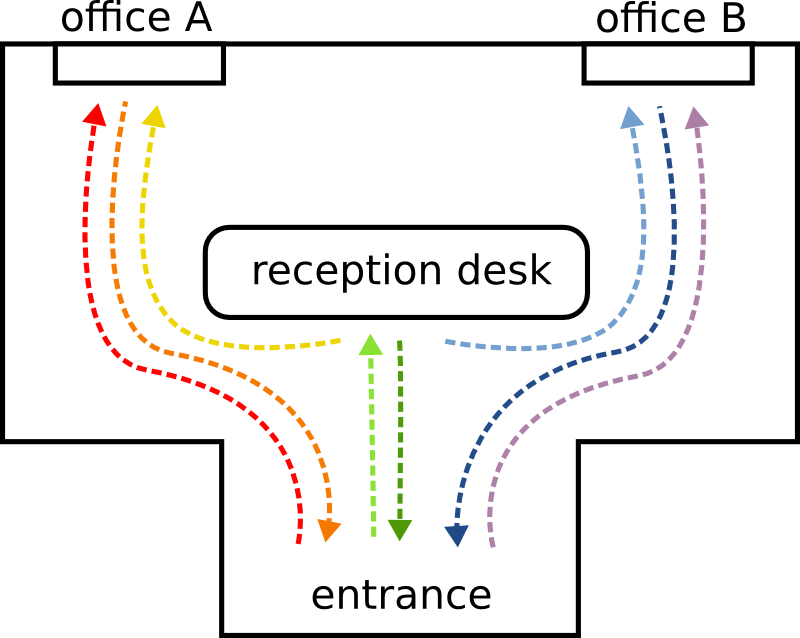
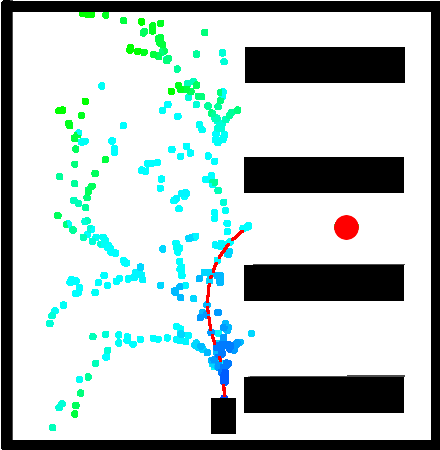
corridor

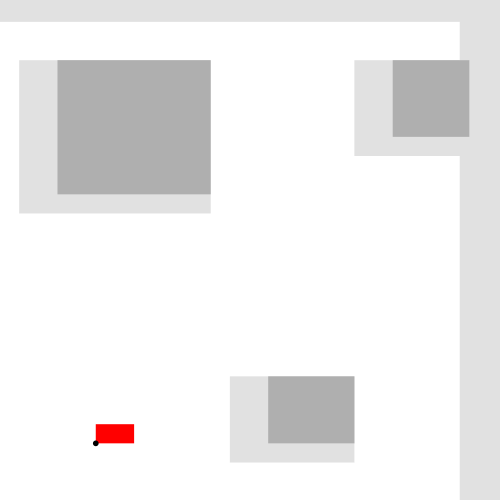
corridor_map
cr_NO_odnm

cr_all

cr_reduce1

cr_reduce1_NO_odnm

cr_reduce2
cr_reduce2_NO_odnm
cr_reduce3

cr_reduce3_NO_odnm
cr_reduce4
cr_with_odnm
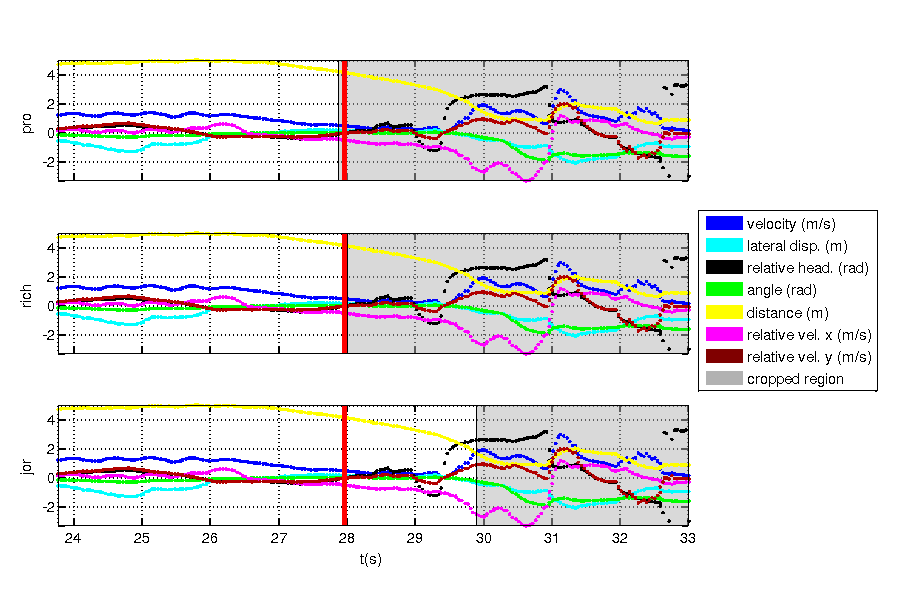
crop_example

crowd_train_station
data_acq_example_l

data_acq_example_v

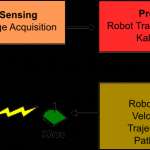
data_acquisition_architecture
data_extraction_architecture

data_labeling

detected_hats

dynamic_window

enon
error_NO_odnm
error_reduce1

error_reduce1_NO_odnm
error_reduce2

error_reduce2_NO_odnm
error_reduce3
error_reduce3_NO_odnm

error_with_odnm

ezioman

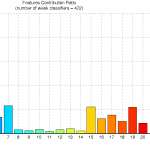
features_all

features_angle
features_distance
features_heading

features_velocity

follow1_l

follow1_v

follow2_l

follow2_v

follow3_l

follow3_v
follow4_l

follow4_v

follow_leader

follow_path

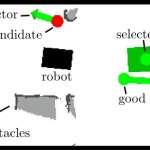
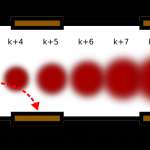
following_positions

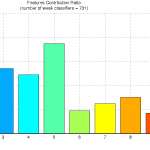
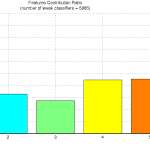
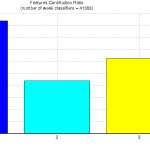
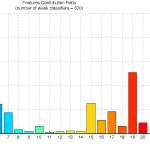
frp

ghmm_learning

ghmm_nodes_

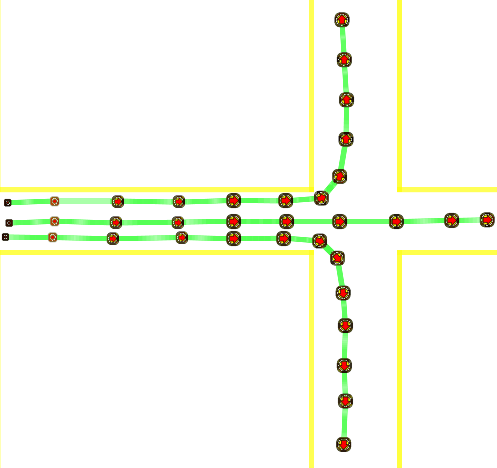
ghmm_traj_

ghmm_traj_and_nodes1

ghmm_traj_and_nodes2
gp1
gp2
gp3

gp_input_1

gp_input_2
gp_model_1
gp_model_2

gp_observations

gp_prediction_edited

guidecane

hmm
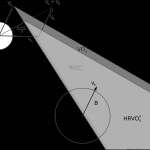
hrvo_left
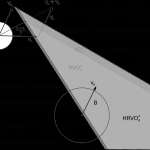
hrvo_right

iepe
inria_hall_text

invite_hand

invite_head
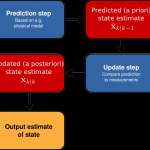
kalman_filter
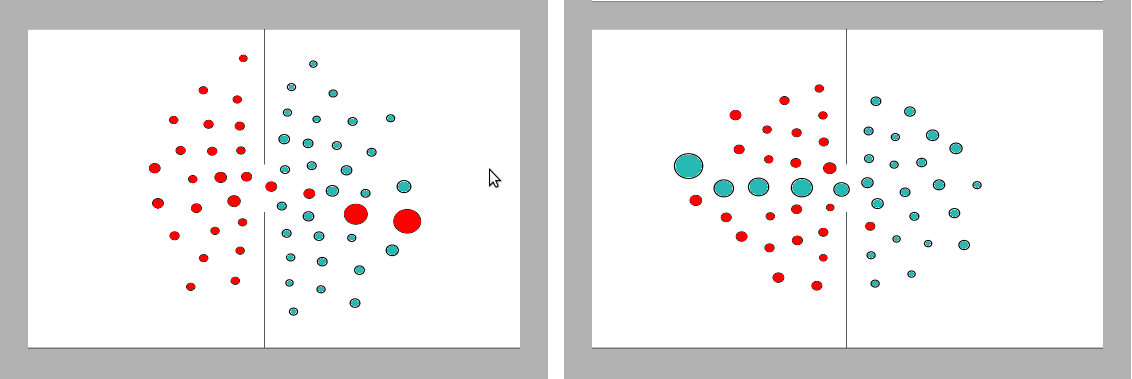
lane_formation
lane_formation

leader_rules
leader_score

markers_at_hall_reduced

methods_workflow_learning

methods_workflow_reasoning

minerva

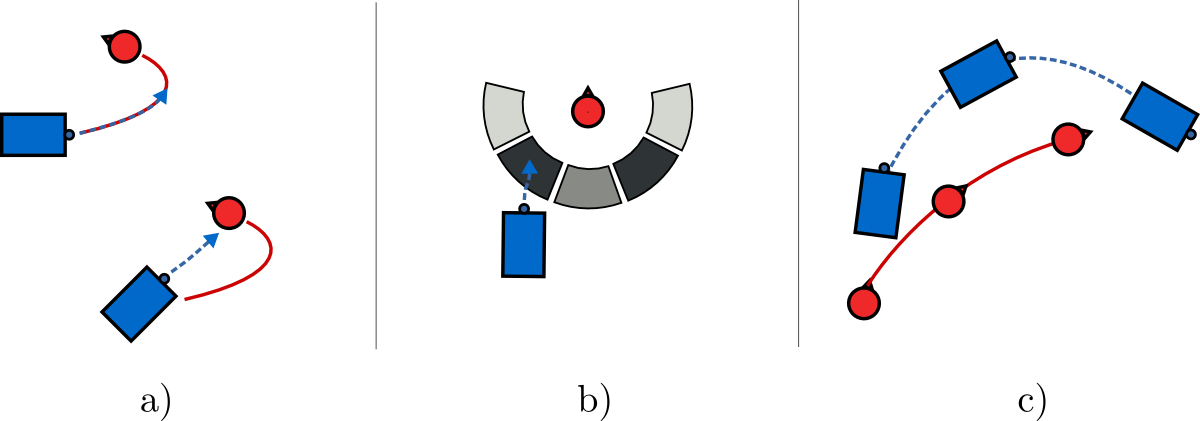
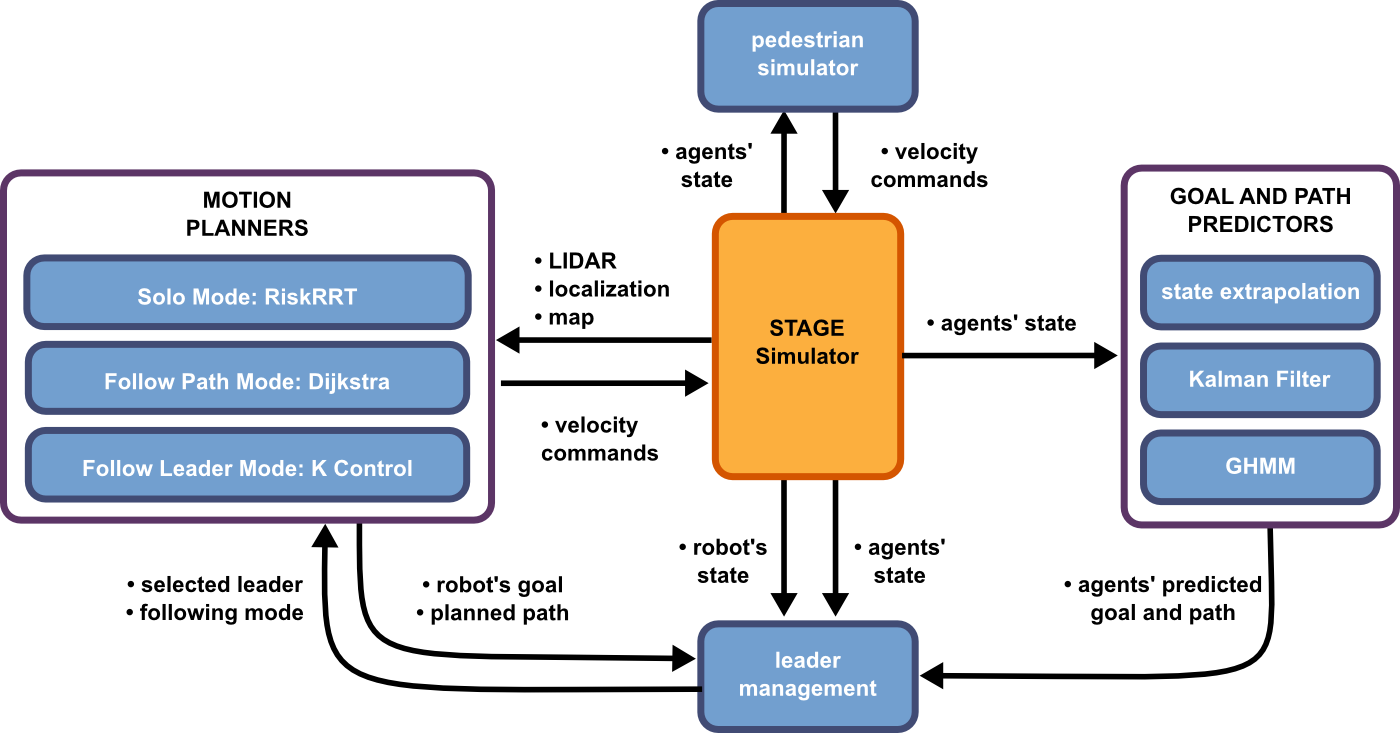
multi_mode_navigation
narrow_passage

navitagion

neato

nlvo_nlvo

nlvo_nlvo2

nlvo_vot

office_extrapolation
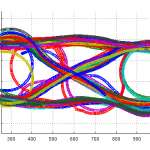
office_typical_paths

open_room

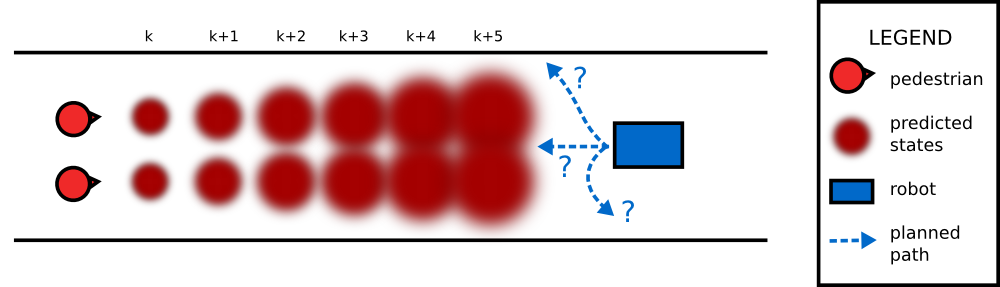
pedestrian_simulator

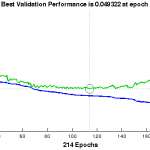
performance_complete_full
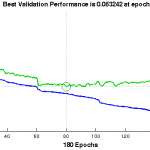
performance_complete_reduced1
performance_complete_reduced2
predi1
predi2

rhino

roadmap

robot_right_side

roomba
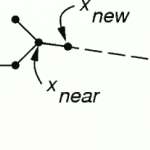
rrt

rrt1

rrt2

rrt3

rvo
setup_log

setup_log_diagonal
setup_schema

sf_ghmm1

sf_ghmm2

sf_ghmm3

simulations

stage_sample

toomas

tpr_robina

training

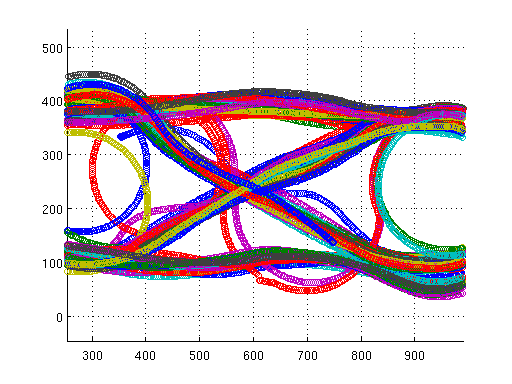
trajectory_simulator

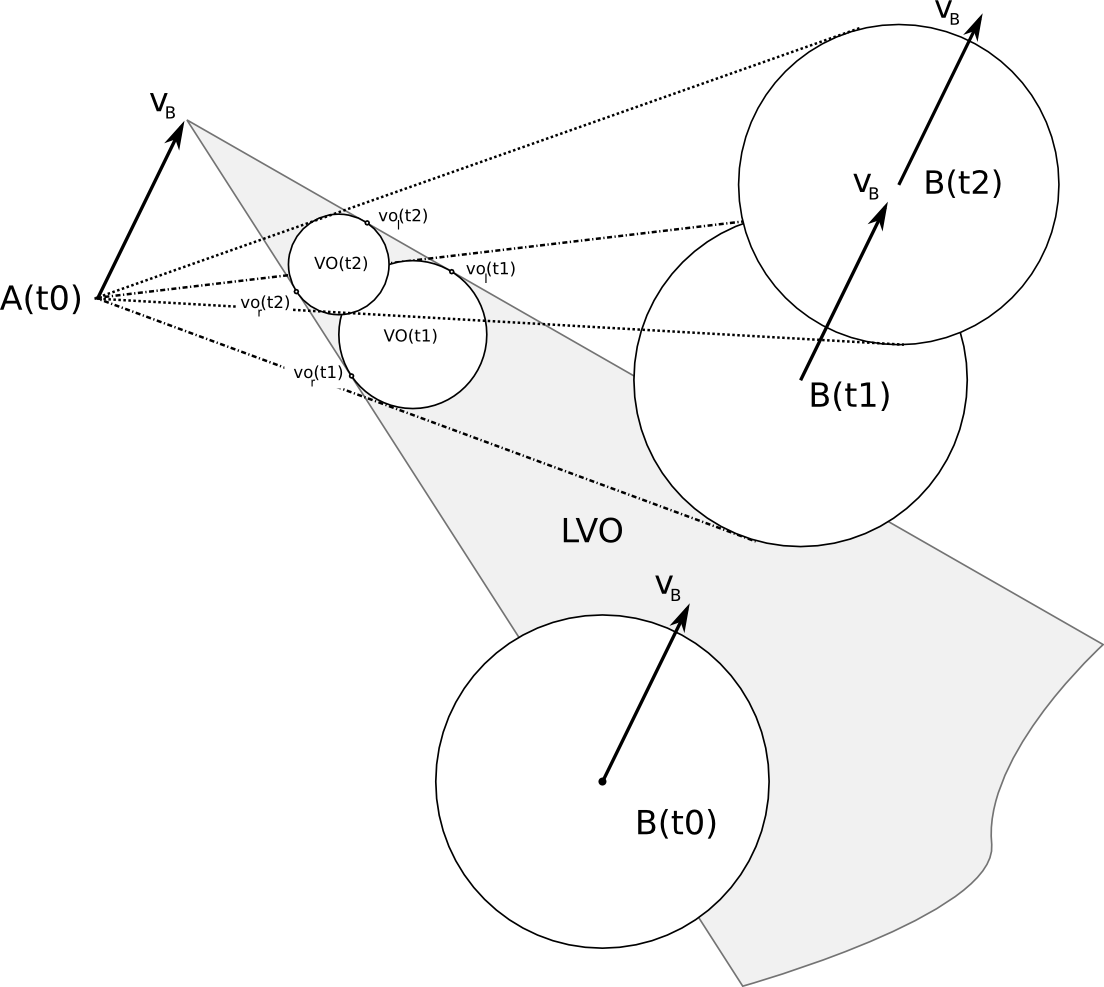
vo1
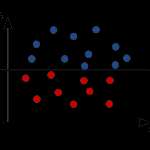
weak_learner

wheelchair_prassler1

wheelchair_prassler2
workspace
x01_tags
x02_tags
 ann_neurons
ann_neurons
 atlasmv
atlasmv
 boids1
boids1
 boids2
boids2
 cca
cca
 cca_ex1
cca_ex1
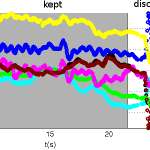
 class_complete_full
class_complete_full
 class_complete_reduced1
class_complete_reduced1
 class_complete_reduced2
class_complete_reduced2
 class_stripped_full
class_stripped_full
 class_stripped_reduced1
class_stripped_reduced1
 class_stripped_reduced2
class_stripped_reduced2
 classification_legend
classification_legend
 classification_test_legend
classification_test_legend
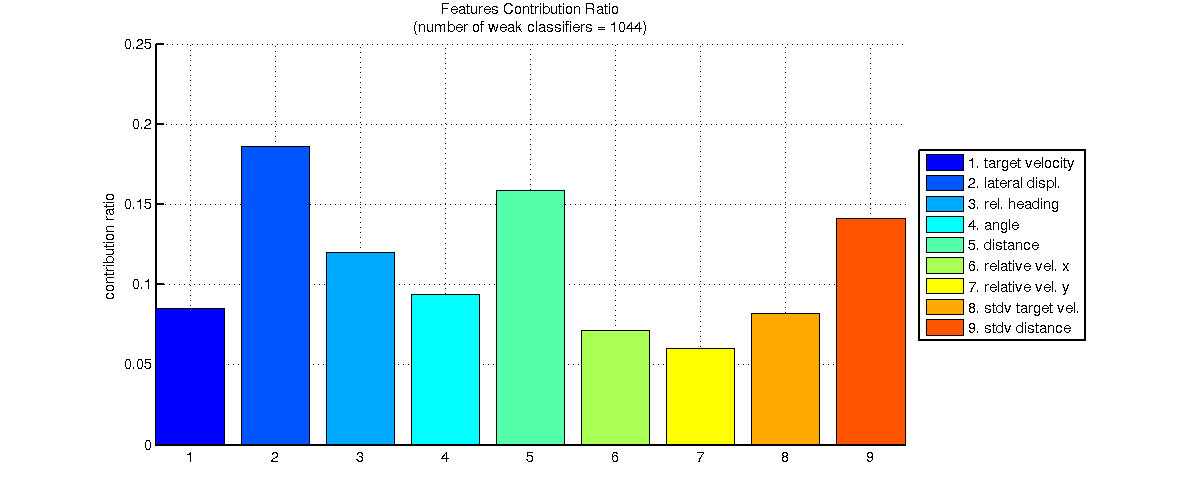
 complete_full
complete_full
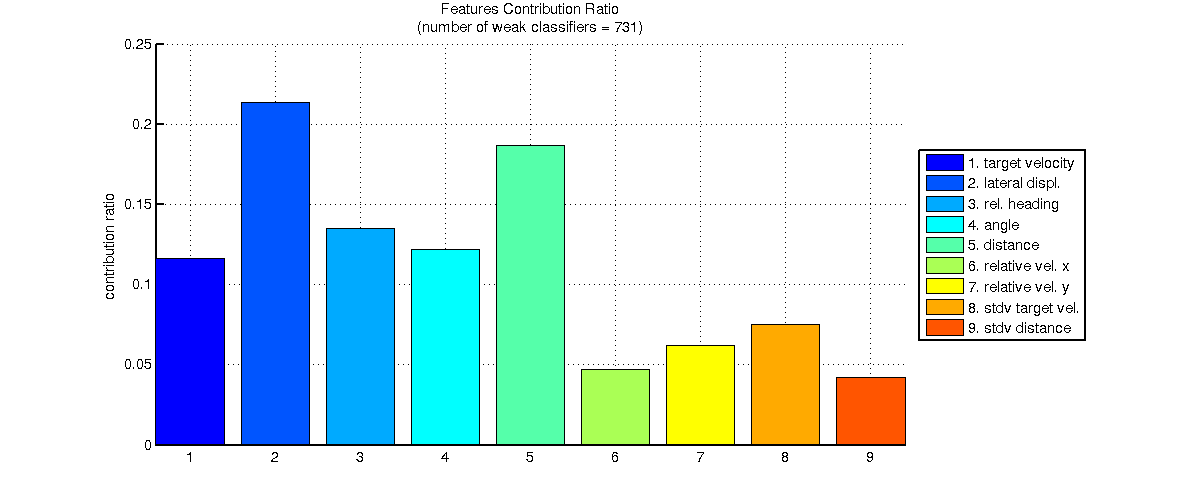
 complete_reduced1
complete_reduced1
 complete_reduced2
complete_reduced2
 configuration_space_robot
configuration_space_robot
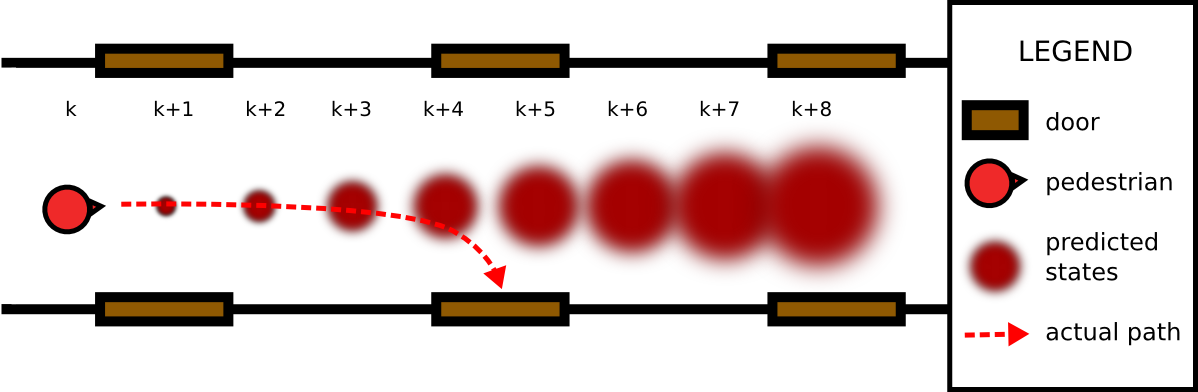 corridor
corridor
 corridor_map
corridor_map
 cr_NO_odnm
cr_NO_odnm
 cr_all
cr_all
 cr_reduce1
cr_reduce1
 cr_reduce1_NO_odnm
cr_reduce1_NO_odnm
 cr_reduce2
cr_reduce2
 cr_reduce2_NO_odnm
cr_reduce2_NO_odnm
 cr_reduce3
cr_reduce3
 cr_reduce3_NO_odnm
cr_reduce3_NO_odnm
 cr_reduce4
cr_reduce4
 cr_with_odnm
cr_with_odnm
 crop_example
crop_example
 crowd_train_station
crowd_train_station
 data_acq_example_l
data_acq_example_l
 data_acq_example_v
data_acq_example_v
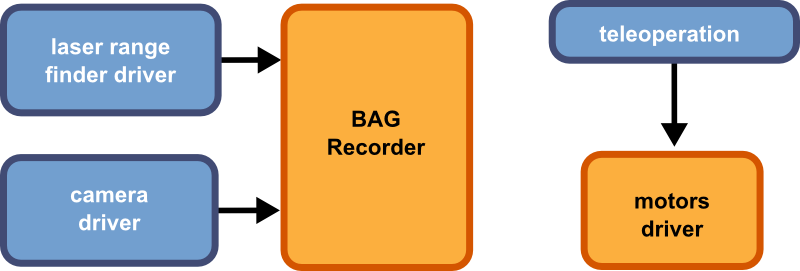 data_acquisition_architecture
data_acquisition_architecture
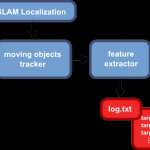
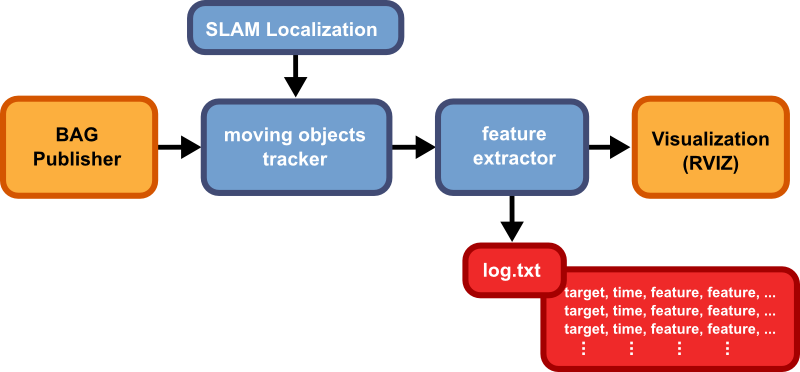 data_extraction_architecture
data_extraction_architecture
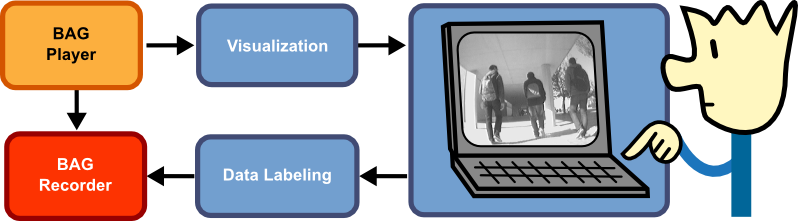 data_labeling
data_labeling
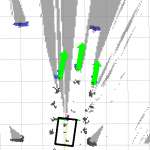
 detected_hats
detected_hats
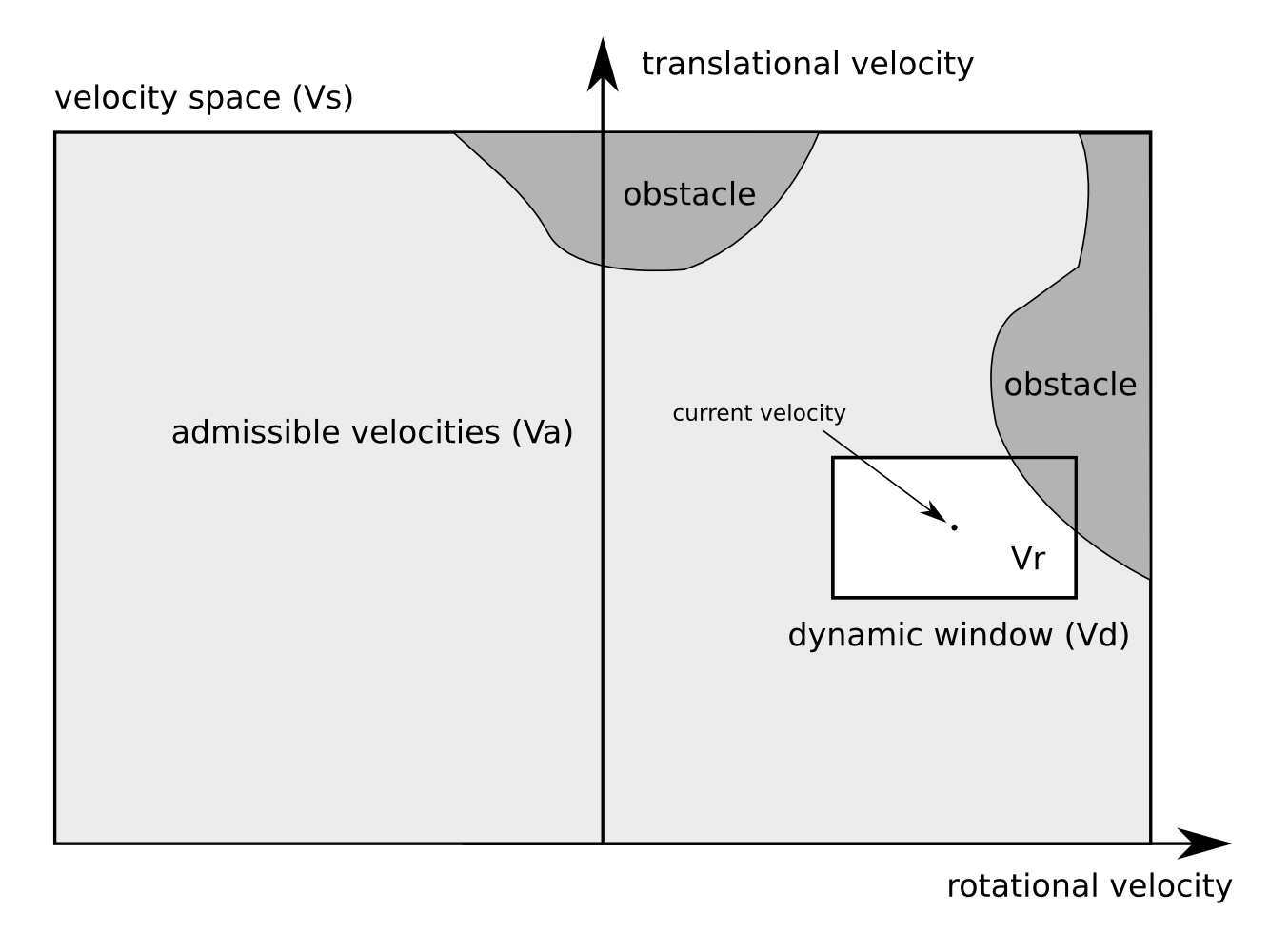 dynamic_window
dynamic_window
 enon
enon
 error_NO_odnm
error_NO_odnm
 error_reduce1
error_reduce1
 error_reduce1_NO_odnm
error_reduce1_NO_odnm
 error_reduce2
error_reduce2
 error_reduce2_NO_odnm
error_reduce2_NO_odnm
 error_reduce3
error_reduce3
 error_reduce3_NO_odnm
error_reduce3_NO_odnm
 error_with_odnm
error_with_odnm
 ezioman
ezioman
 features_all
features_all
 features_angle
features_angle
 features_distance
features_distance
 features_heading
features_heading
 features_velocity
features_velocity
 follow1_l
follow1_l
 follow1_v
follow1_v
 follow2_l
follow2_l
 follow2_v
follow2_v
 follow3_l
follow3_l
 follow3_v
follow3_v
 follow4_l
follow4_l
 follow4_v
follow4_v
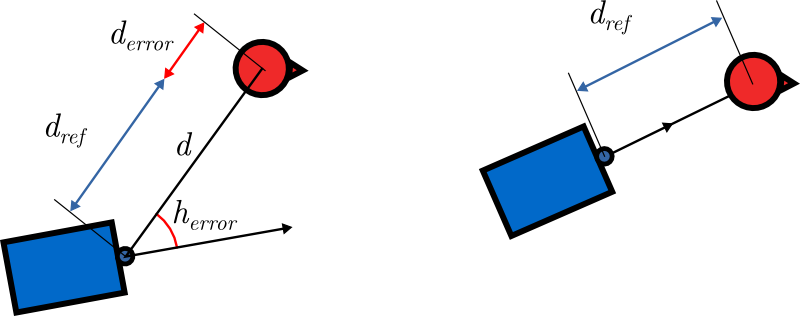 follow_leader
follow_leader
 follow_path
follow_path
 following_positions
following_positions
 frp
frp
 ghmm_learning
ghmm_learning
 ghmm_nodes_
ghmm_nodes_
 ghmm_traj_
ghmm_traj_
 ghmm_traj_and_nodes1
ghmm_traj_and_nodes1
 ghmm_traj_and_nodes2
ghmm_traj_and_nodes2
 gp1
gp1
 gp2
gp2
 gp3
gp3
 gp_input_1
gp_input_1
 gp_input_2
gp_input_2
 gp_model_1
gp_model_1
 gp_model_2
gp_model_2
 gp_observations
gp_observations
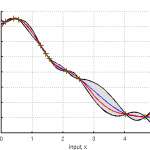
 gp_prediction_edited
gp_prediction_edited
 guidecane
guidecane
 hmm
hmm
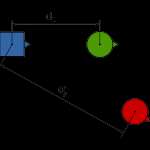
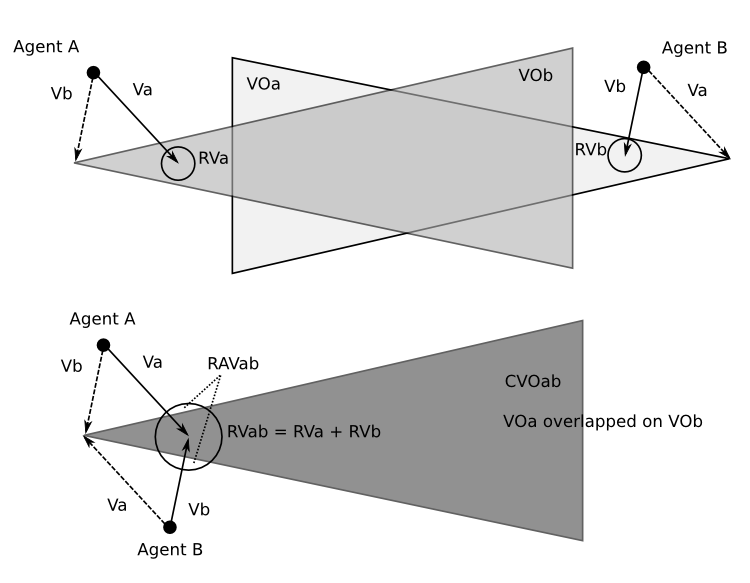
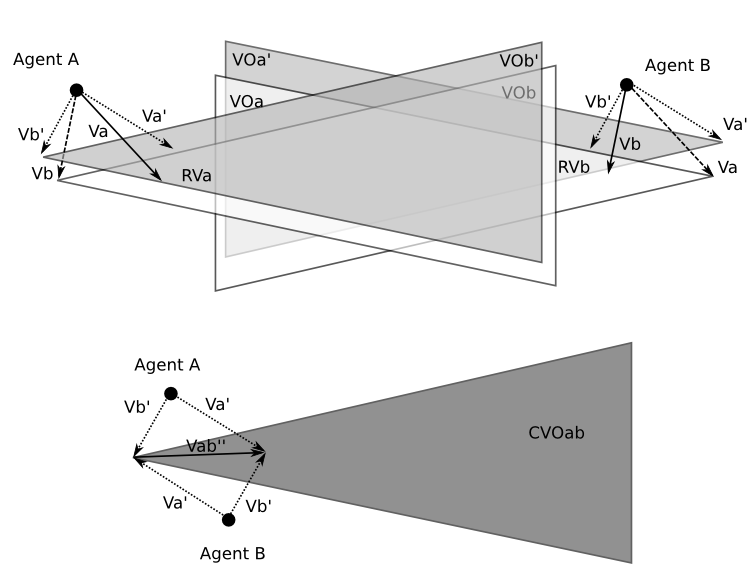
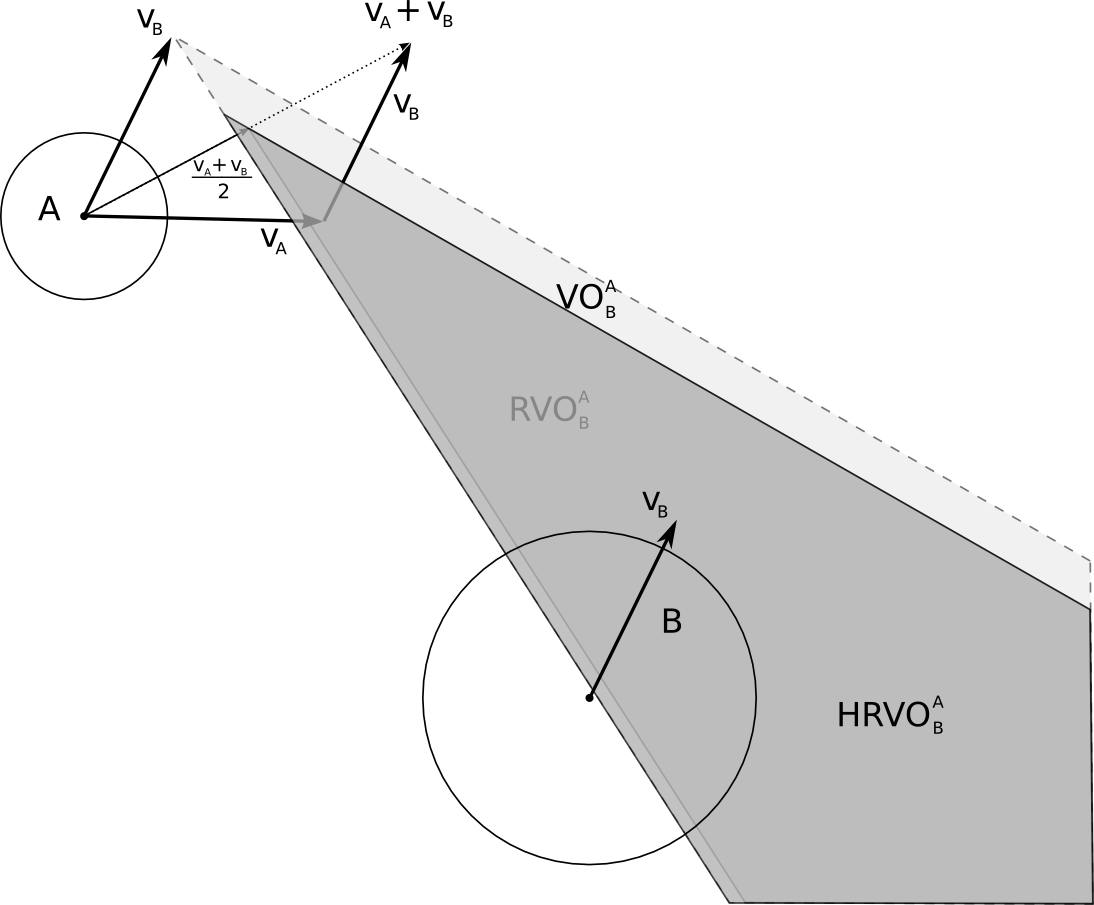 hrvo_left
hrvo_left
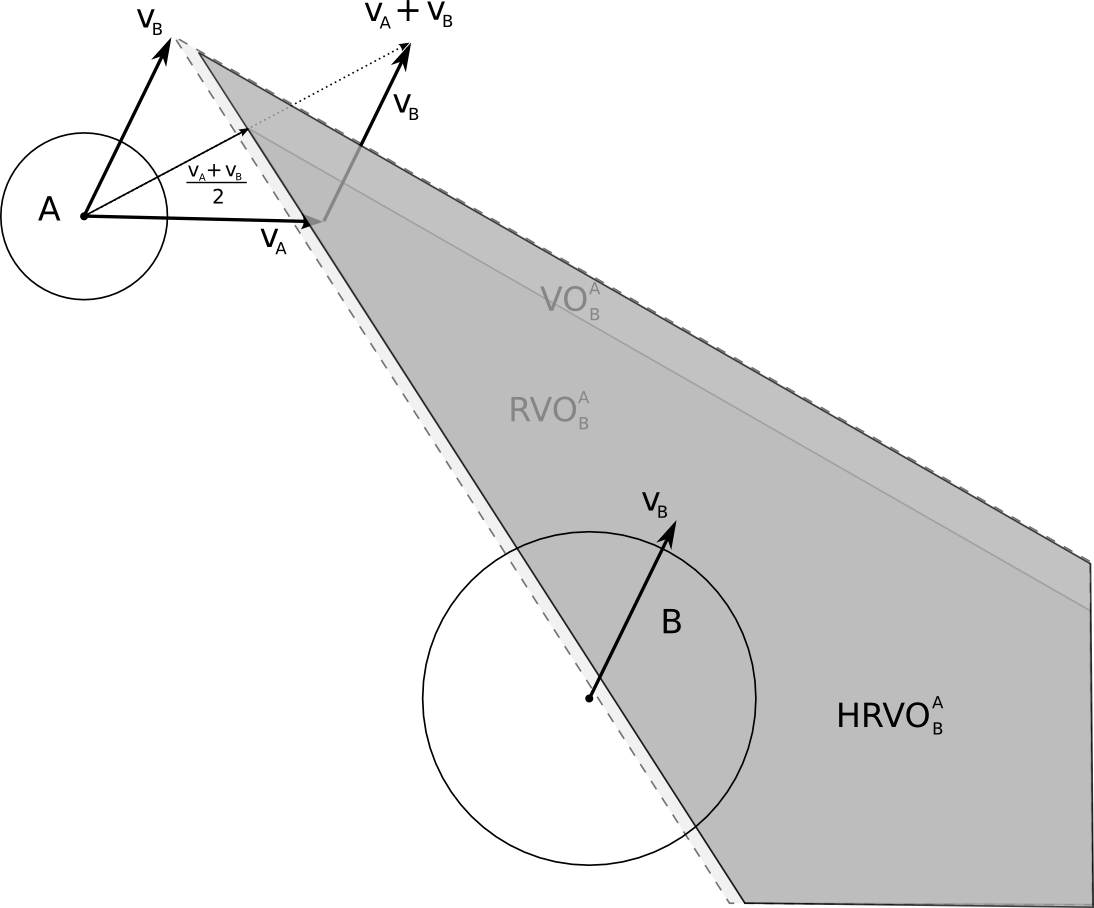 hrvo_right
hrvo_right
 iepe
iepe
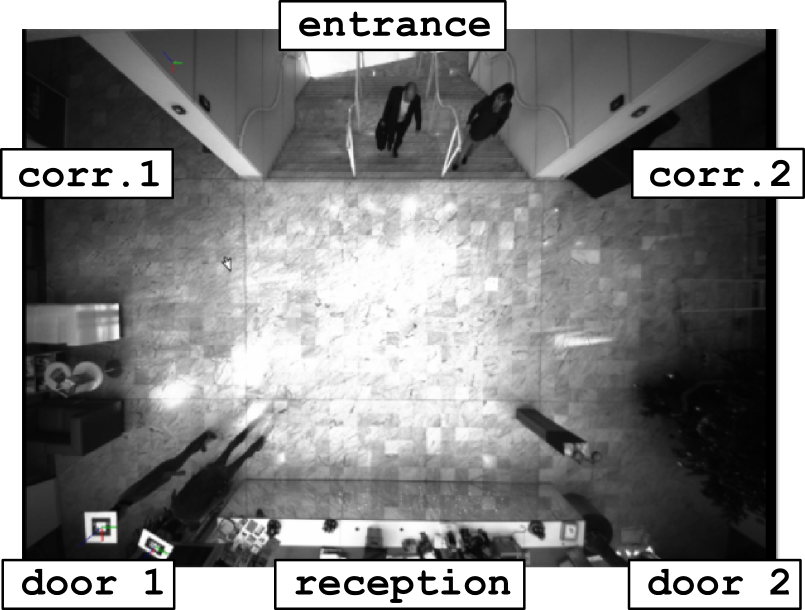 inria_hall_text
inria_hall_text
 invite_hand
invite_hand
 invite_head
invite_head
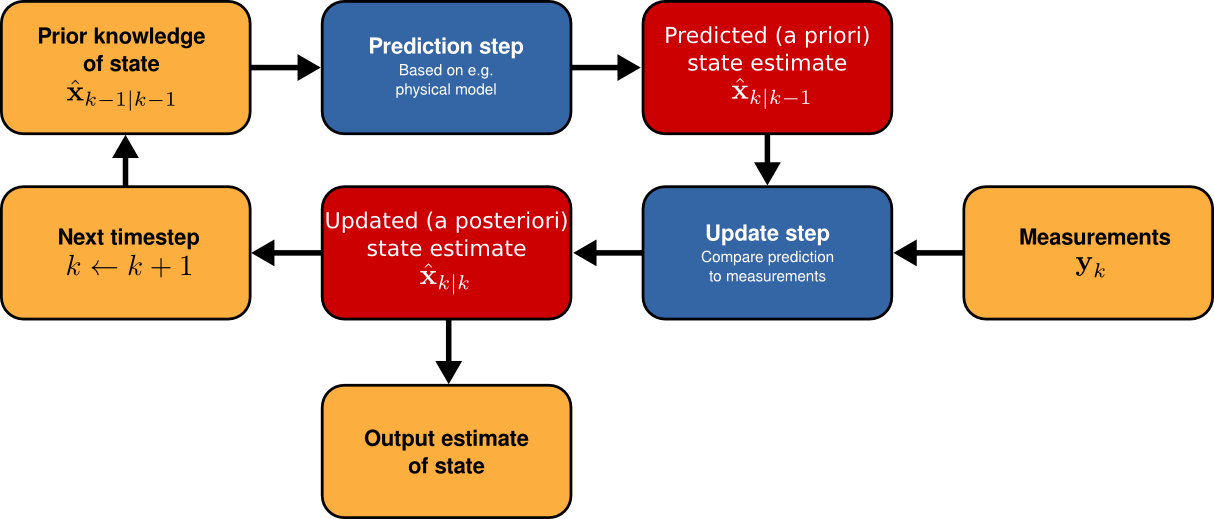 kalman_filter
kalman_filter
 lane_formation
lane_formation
 lane_formation
lane_formation
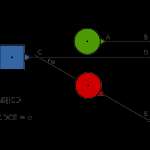
 leader_rules
leader_rules
 leader_score
leader_score
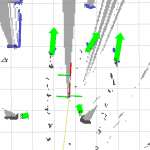
 markers_at_hall_reduced
markers_at_hall_reduced
 methods_workflow_learning
methods_workflow_learning
 methods_workflow_reasoning
methods_workflow_reasoning
 minerva
minerva
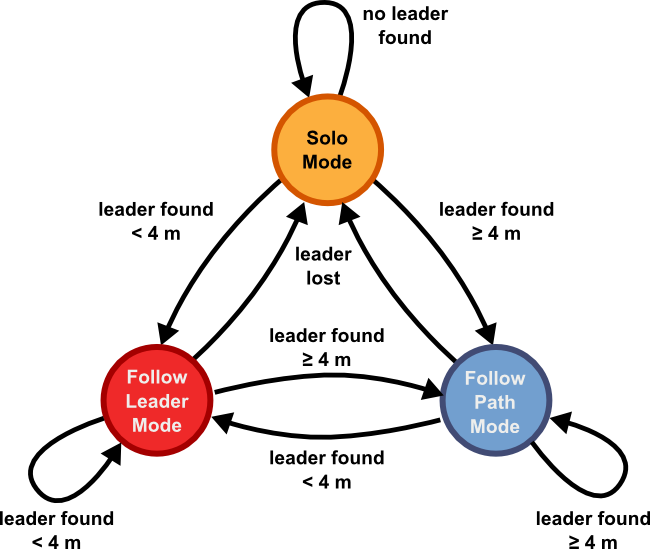 multi_mode_navigation
multi_mode_navigation
 narrow_passage
narrow_passage
 navitagion
navitagion
 neato
neato
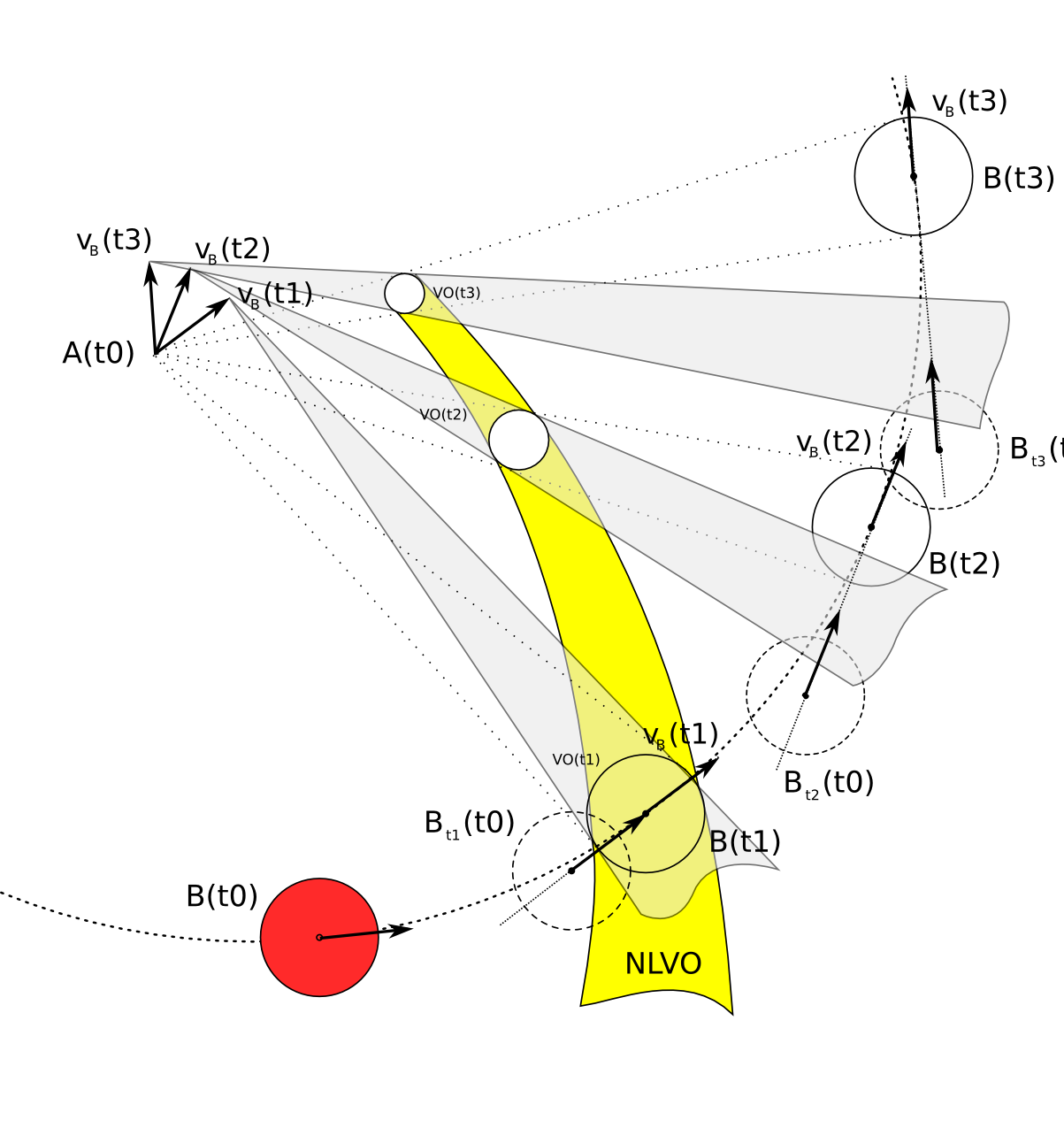 nlvo_nlvo
nlvo_nlvo
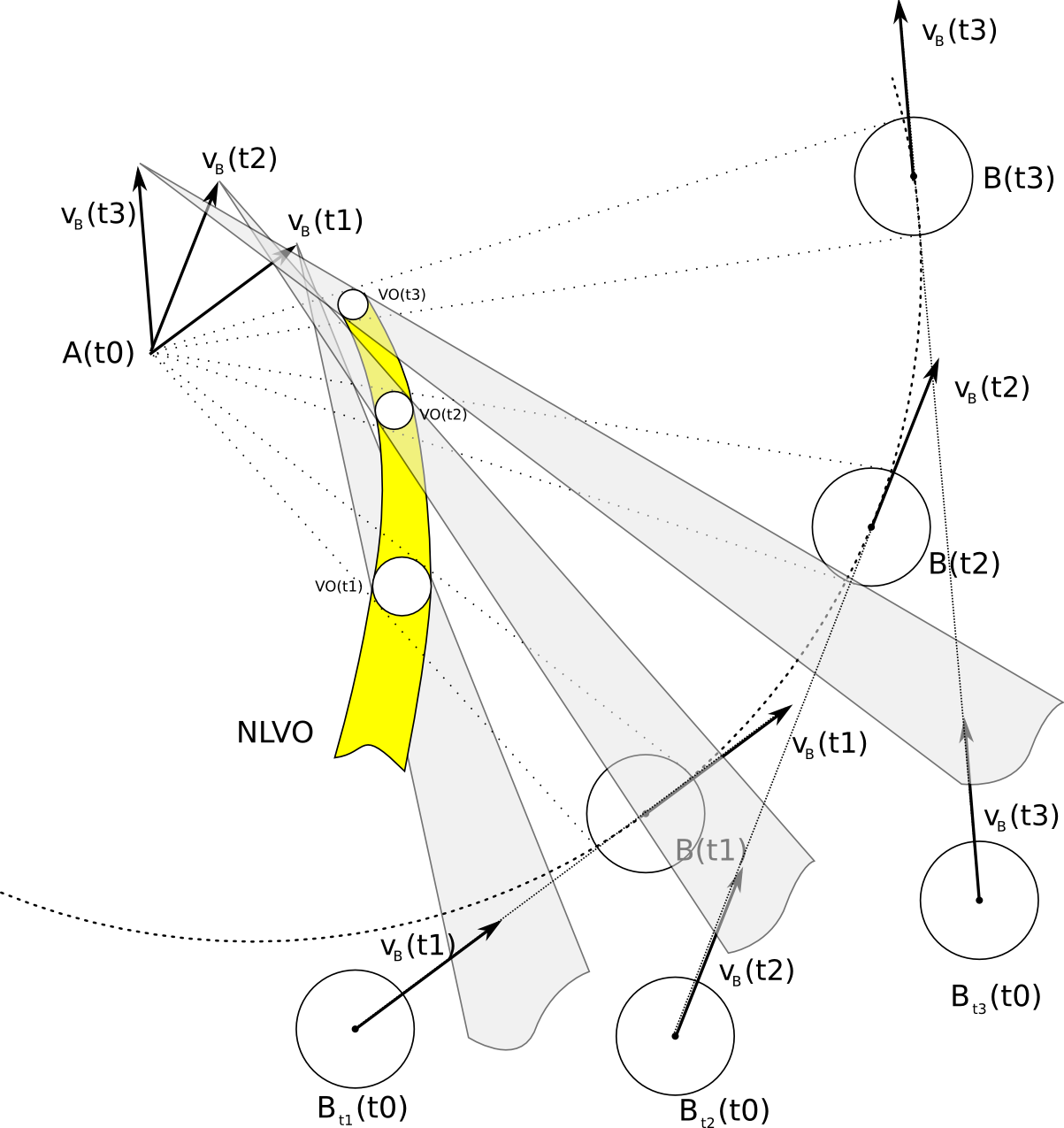 nlvo_nlvo2
nlvo_nlvo2
 nlvo_vot
nlvo_vot
 office_extrapolation
office_extrapolation
 office_typical_paths
office_typical_paths
 open_room
open_room
 pedestrian_simulator
pedestrian_simulator
 performance_complete_full
performance_complete_full
 performance_complete_reduced1
performance_complete_reduced1
 performance_complete_reduced2
performance_complete_reduced2
 predi1
predi1
 predi2
predi2
 rhino
rhino
 roadmap
roadmap
 robot_right_side
robot_right_side
 roomba
roomba
 rrt
rrt
 rrt1
rrt1
 rrt2
rrt2
 rrt3
rrt3
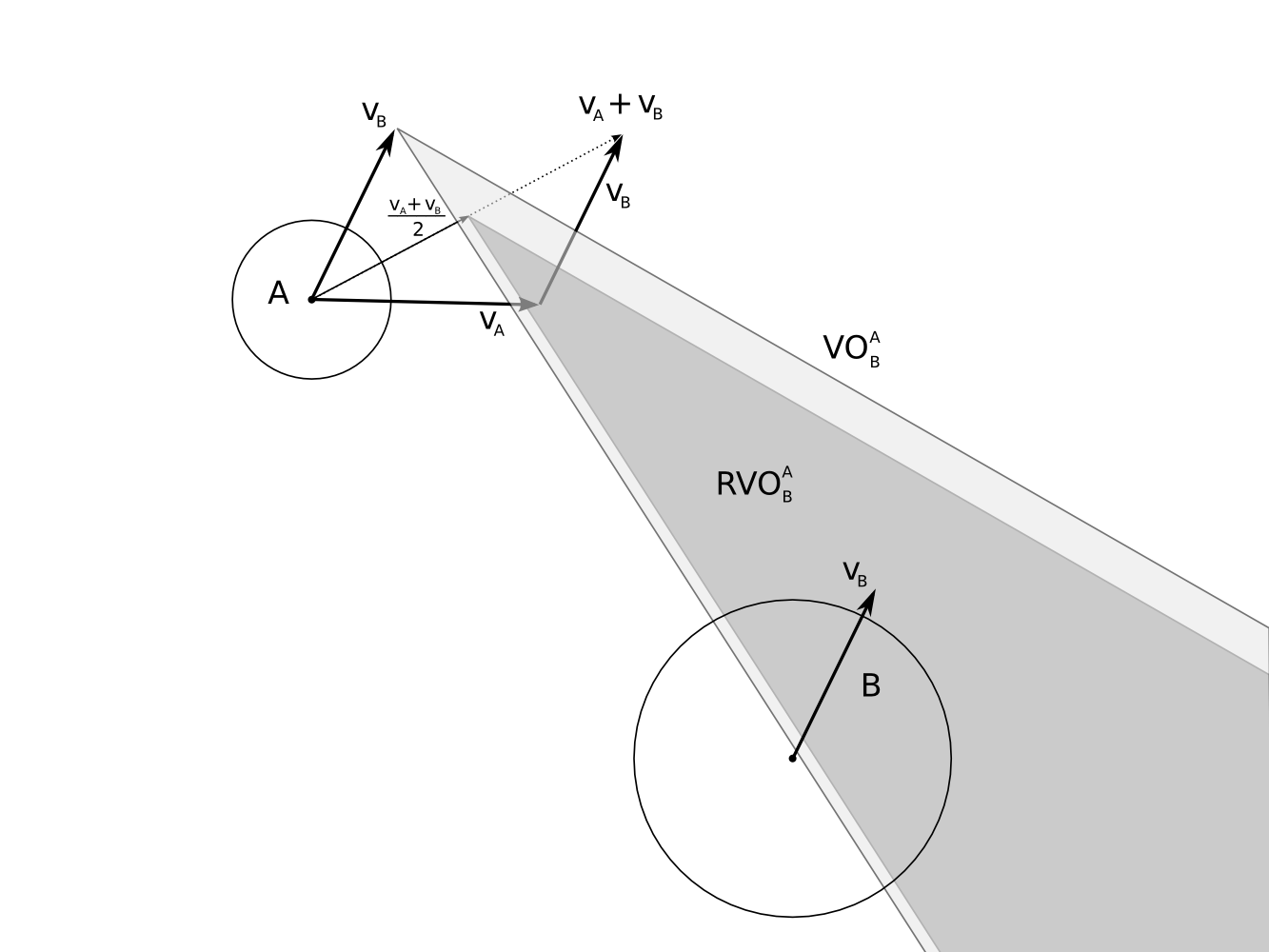 rvo
rvo
 setup_log
setup_log
 setup_log_diagonal
setup_log_diagonal
 setup_schema
setup_schema
 sf_ghmm1
sf_ghmm1
 sf_ghmm2
sf_ghmm2
 sf_ghmm3
sf_ghmm3
 simulations
simulations
 stage_sample
stage_sample
 toomas
toomas
 tpr_robina
tpr_robina
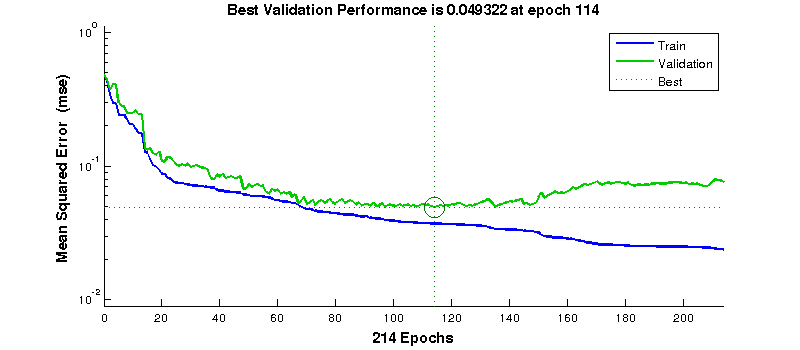
 training
training
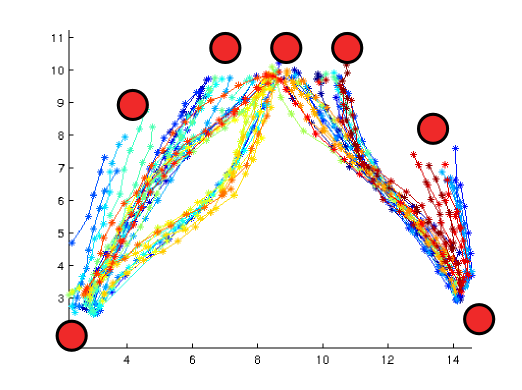
 trajectory_simulator
trajectory_simulator
 vo1
vo1
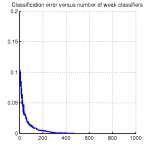
 weak_learner
weak_learner
 wheelchair_prassler1
wheelchair_prassler1
 wheelchair_prassler2
wheelchair_prassler2
 workspace
workspace
 x01_tags
x01_tags
 x02_tags
x02_tags